|
POJAZDY BEZZAŁOGOWE AUTONOMICZNY DRON MORSKI |
|
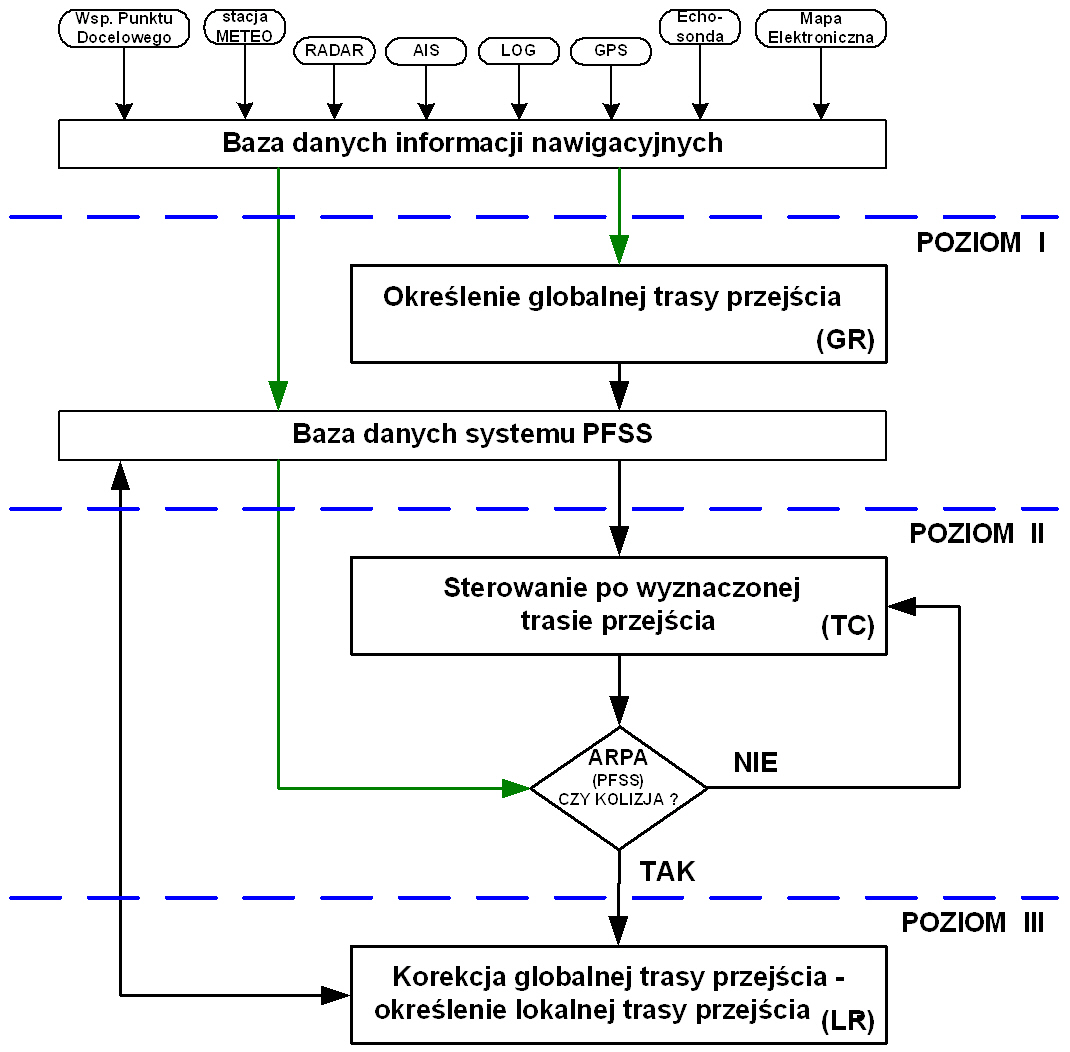
W 2005 roku w ramach prowadzonych prac naukowo-badawczych opracowany został Hybrydowy System Sterowania Statkiem (PFSS Path Finder & Ship Steering). Jednym z trudnych do rozwiązania zagadnień optymalizacji dynamicznej jest zadanie planowania trasy przejścia obiektu ruchomego i sterowania wzdłuż tej trasy w środowisku dynamicznym. Rozwiązanie tego problemu, w którym poszukuje się rozwiązań globalnie optymalnych, może mieć zasadnicze zastosowanie w szeregu zagadnień sterowania obiektami rzeczywistymi np. dotyczących poruszającego się drona autonomicznego w zmieniającym się środowisku (dostarczenie określonego przedmiotu do zdefiniowanego celu, przeszukiwanie określonej przestrzeni itp.), statku jako obiektu omijającego inne statki lub obszary zmieniającej się pogody czy okrętu wojennego unikającego przeszkody. Opracowany system PFSS łączy w sobie pracę dwóch technik komputerowych, algorytmów ewolucyjnych do wyznaczania optymalnej i bezpiecznej trasy przejścia pojazdu bezzałogowego oraz sterowania rozmytego do kierowania pojazdem po zadanej trasie przejścia.
Struktura systemu PFSS [1]
Dodatkową i istotną cechą systemu jest możliwość bezpiecznego oraz automatycznego sterowania pojazdem w sytuacjach kolizyjnych. System potrafi automatycznie wyznaczyć trasę przejścia do punktu docelowego, przeszukiwać określoną przestrzeń z ustalonym odstępem pomiedzy trajektoriami, a także uwzględniać poruszające się w środowisku inne obiekty statyczne i dynamiczne (inne jednostki pływające). Działanie systemu PFSS zweryfikowano w kilkudziesięciu rzeczywistych sytuacjach nawigacyjnych.
Wielozadaniowy autonomiczny dron morski (długość 180cm) z systemem PFSS [1]
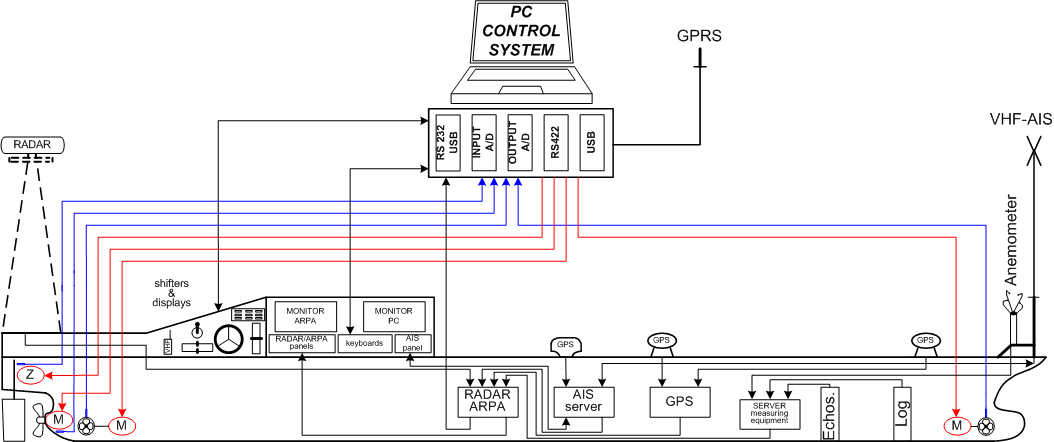
Wielozadaniowy autonomiczny dron morski (długość 630cm) z systemem PFSS [2]
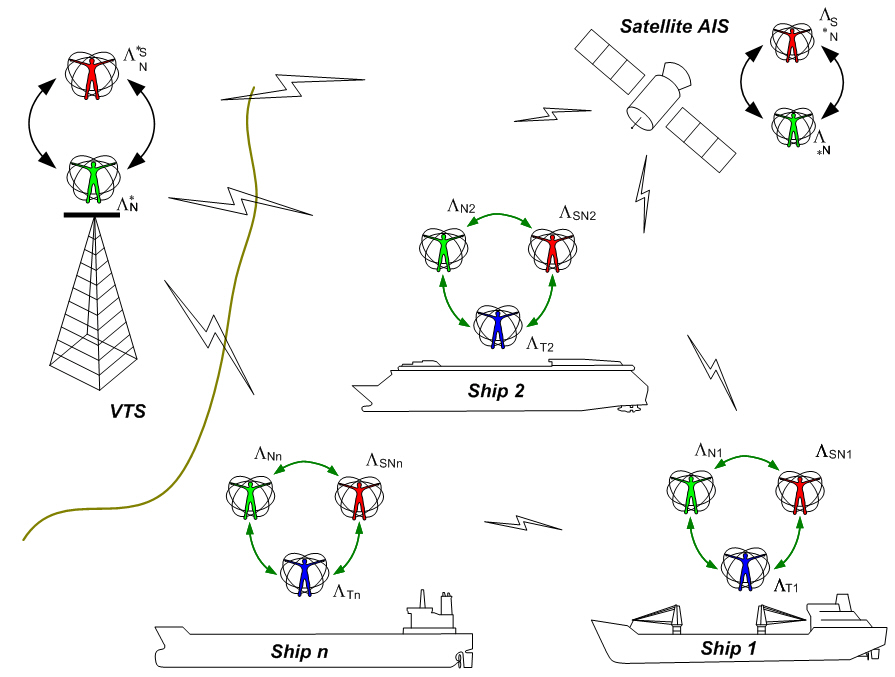
Kolejnym systemem służącym do sterowania ruchem na danym akwenie jest wielozadaniowy Agentowy System Sterowania Ruchem Statków na danym akwenie.
Struktura wielozadaniowego Agentowego Systemu Sterowania Ruchem Statków [3,4,5]
Literatura: [1] Łebkowski A., „Hybrydowy system sterowania obiektem ruchomym w środowisku dynamicznym" Politechnika Gdańska 2005 [2] Gierusz W., Łebkowski A., „The researching ship Gdynia". Polish Maritime Research Special Issue S1(74), 2012 Vol 19. [3] Łebkowski A., Control of ship movement by the agent system. Polish Journal of Environmental Studies Vol.17, 2008. [4] Łebkowski A., Negocjacje pomiędzy platformami agentowymi. Zeszyty Naukowe Akademii Morskiej w Gdyni, Gdynia 2013. [5] Łebkowski A., Evolutionary Methods in the Management of Vessel Traffic. Information, Communication and Environment, 2015. |